
是的,埃隆。全自动驾驶(FSD)需要雷达
特斯拉最近向美国联邦通信委员会(FCC)提交了一份申请,表示计划从2023年开始为其车辆添加雷达技术。正如许多媒体当时所指出的那样,事实上,特斯拉将“重新添加”雷达功能,因为他们移除了先前实施的上一代雷达。福布斯甚至说,“特斯拉可能会增加雷...
特斯拉最近向美国联邦通信委员会(FCC)提交了一份申请,表示计划从2023年开始为其车辆添加雷达技术。正如许多媒体当时所指出的那样,事实上,特斯拉将“重新添加”雷达功能,因为他们移除了先前实施的上一代雷达。福布斯甚至说,“特斯拉可能会增加雷达,这是他们绝对需要的关键。”特斯拉慢慢开始意识到,如果没有远程成像雷达技术,就不会有全自动驾驶(FSD)车辆或自主驾驶。
在Metawave,我们已经为商业和军事应用开发了一段时间的先进雷达系统,我们非常同意特斯拉的决定。在这个问题上,埃隆·马斯克和他的团队绝对做出了正确的选择。
数字雷达的缺点
然而,我们在实际应用中的经验表明,对于特斯拉(以及地球上几乎所有其他汽车制造商)知道的高度自动化驾驶辅助系统(ADAS),仅使用数字雷达解决方案是不够的,即使是部分自动驾驶。
沙山路上一家著名的风投公司曾问我:“如果你拥有无限的数字计算能力,并且成本为零,你能提供完全自动驾驶所需的远程成像雷达功能吗?”我的回答很简单:“不,除非你能找到打破物理定律的方法。”
马哈·阿丘
模拟相控阵天线一直是,并且将永远是全球所有军用雷达系统的基石,原因非常充分。如果成本、尺寸或功耗不是问题,它们可以在所有天气、地形和操作条件下提供可靠、鲁棒、远程检测和跟踪。
数字雷达的成像能力较短,在密集杂波和大量移动物体中性能下降。对于这些系统,必须集成模拟雷达技术(美国军方几十年来一直使用的那种雷达)。为什么?简单地说,纯数字雷达无法提供成功检测困难道路车辆问题(或拐角情况)所需的长距离4D成像,例如250米处的摩托车检测。答案是军用级模拟雷达。更具体地说,理想的解决方案是模拟、相控阵雷达和数字MIMO(多输入、多输出)天线技术的混合。
让数字增强模拟雷达解决方案适用于主流应用(如汽车)是Metawave所做的。我们还花费大量时间教育行业如何实现完全自主。最近,当被问及SpaceX的Starlink卫星互联网是否可以用于高速运输时,马斯克表示,“是的。对于相控阵天线来说,一切都很慢。”的确
Autonomy需要更好的传感器融合
一点历史可以揭示是什么推动了自治革命。自动驾驶汽车的梦想始于2002年,DARPA前局长托尼·泰瑟(Tony Tether)的自动驾驶重大挑战《大挑战》激发了投资者开始自动驾驶范式转变的欲望,巨大的野心和每一项新技术的宣传和头条新闻推动了这一转变。
完全自主承诺到2019年通过深度学习、人工智能和广泛的中央计算能力(主要由摄像头和激光雷达传感器驱动)实现。即使经过数十亿美元的投资,由于光学传感器技术的根本局限性,以及“传感器融合”概念无法在长距离、恶劣天气和各种运行条件(如高速)下正常运行,完全自动驾驶汽车的梦想离实现还有很长的路要走。
坐在驾驶座上
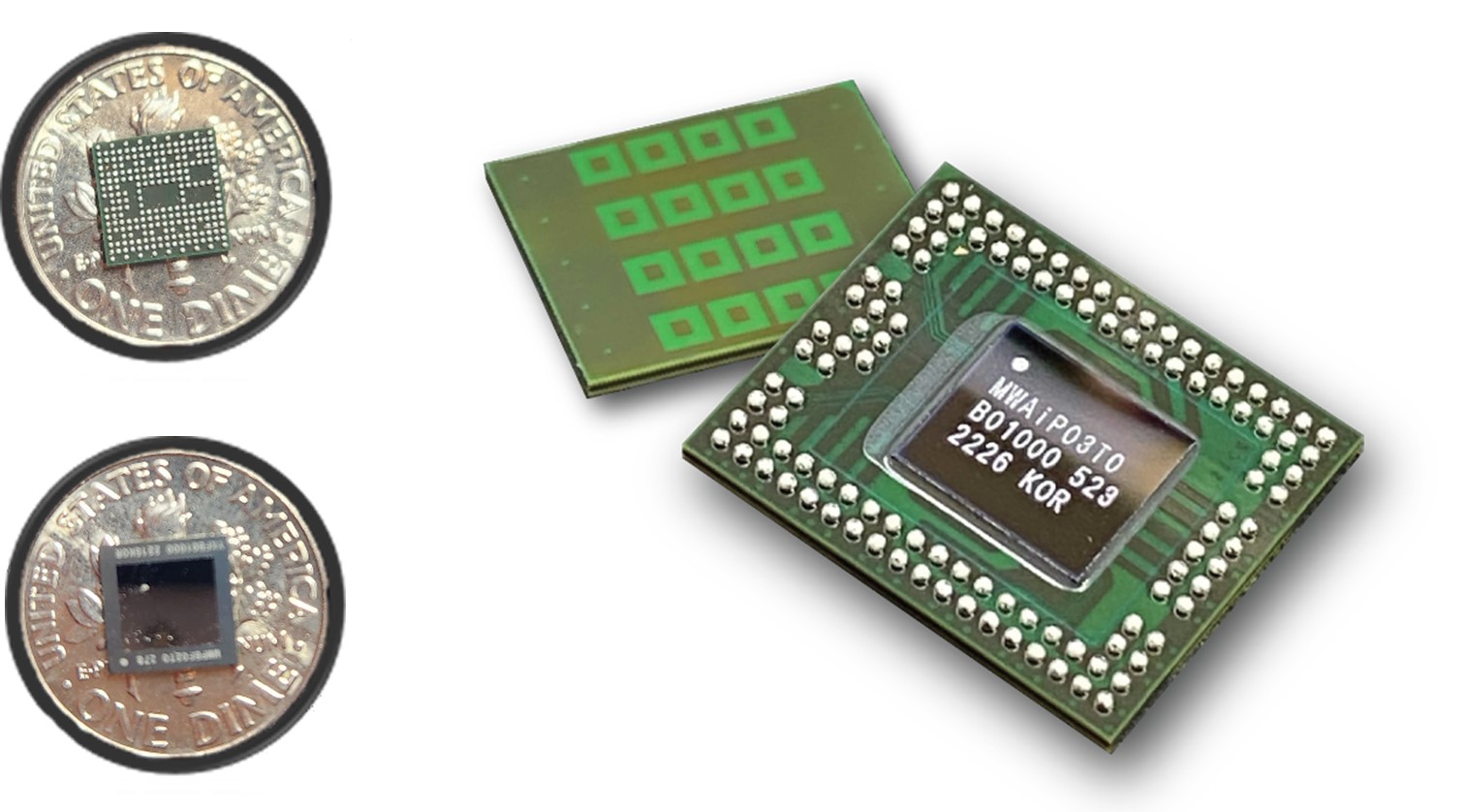
理解完全自动驾驶需要什么(以及为什么它很难实现)的一种方法是真正让自己坐在驾驶座上。回家的路上下着大雨,你停在一个繁忙的十字路口等待左转。对面车道上有一辆快速驶来的摩托车,在它到达十字路口之前,你无法用肉眼判断你是否有足够的时间左转。这种检测情况对于人类驾驶员来说很困难,因此您可以想象对于自动驾驶或部分自动驾驶车辆来说有多困难。对于上一代前角传感器,这种情况是一种即将发生的事故。但随着经过军事测试的模拟雷达与天线封装技术(AiP)的结合,真正的自动驾驶场景和公路速度在所有天气条件下都是可能的。
雷达与激光雷达
公平地说,自动驾驶汽车的安全运行需要一整套传感器。需要摄像头来读取道路标志、识别物体和查看车道线,但在夜间,当灯光闪烁、天气恶劣、光圈被碎片堵塞时,摄像头会很难工作。
调频连续波(FMCW)雷达用于测量物体在水平和垂直方向上的距离、速度和位置,最适合跟踪运动中的物体。超声波是主要用于停车应用的最常见的近距离传感器。最后,激光雷达刚刚开始用于生产汽车,用于具有极高角度分辨率的中短程探测。
因为激光雷达和雷达有相似的传感方法,所以它们经常被相互比较。激光雷达具有像相机一样的分辨率优势,因为两者都在光谱中工作,而雷达更善于在更远的距离和恶劣的天气条件下看到物体。激光雷达和雷达都是通过发送已知波长的电磁(EM)辐射来工作的,并且可能以特定的方式编码。然后,EM辐射从传输辐射路径中的物体反射。激光雷达和雷达的核心区别是电磁辐射的波长。雷达和激光雷达范围内的电磁辐射财产差异很大,因此两种模式的操作能力不同。
尽管激光雷达产生的高分辨率成像是当前雷达传感器无法实现的,但雷达技术的进步,特别是Metawave的SPEKTRA雷达的混合模拟波束形成和波束控制以及数字MIMO(多输入多输出)中的技术进步,正在推动雷达分辨率的快速提高,具有宽视野(FoV)和快速帧速率。此外,FMCW雷达基于多普勒现象提供高精度的实时速度测量。在恶劣的天气条件下,激光雷达可能会降低射程,甚至完全失效。这是由于空气中的水滴和微粒导致的多次散射和吸收的结果。在雷达中使用毫米波长时,这些散射和吸收退化不是问题。
问题是,随着L4完全自主的采用速度明显放缓,以及最近L2+软件定义车辆技术的加速,激光雷达是一个可行的解决方案吗?时间会证明一切,因为相机、远程想象雷达和优化的融合感知的组合有一天会带来完全的自主性。为此,埃隆·马斯克将激光雷达称为“拐杖。”
从Metawave的角度来看,雷达与激光雷达之间的争议不如理解需要解决的问题那么重要。为了实现汽车安全目标,自动驾驶汽车几乎肯定需要能够感测零米至350米距离物体的摄像头,以及至少一种高分辨率的主动感测模式,如雷达、激光雷达或超声波。考虑到这些主动传感模式,以及实现汽车安全完整性等级(ASIL)评级的“及时故障”公差极低,相信雷达、激光雷达和超声波将是自动驾驶汽车(AV)传感器套件的关键组件。为了达到相关ASIL级别,需要传感器冗余。
传感器技术需要满足所有可能性,以实现安全自动驾驶
数字增强的模拟雷达使车辆制造商能够提供当今高度自动化的驾驶,并部署更先进的功能,包括左转辅助、自动紧急制动、自适应巡航控制、交通拥堵驾驶员、高速公路驾驶员、车道辅助和其他安全功能。如今,汽车制造商已经在推动自动驾驶的发展,他们能够在驾驶盘后面坐着人的时候部署这些安全功能。传感器技术创新将继续快速发展,人们对确保世界各地繁忙城市和城市地区安全顺畅的驾驶体验寄予厚望。设计可靠且价格合理的传感器,具有适合商业可行性的形状因素,这一点现在至关重要,今后也将至关重要。
为什么时机很关键?考虑到当前的电气化竞争,原始设备制造商正在通过推出空中软件服务和更新的货币化计划来重新定义其经常性收入模式。由于硬件无法通过此类软件轻松升级,电动和自动驾驶汽车需要支持最高级别的安全性、灵活性和大规模的附加服务。埃隆·马斯克(Elon Musk)从特斯拉(Tesla)的第一天起就推动了这一愿景,打造L2+消费级汽车,以根据需求过渡到完全自动驾驶的L4级汽车,正在缓慢但肯定地成为现实。